
Is this the year the U.S. finally lands a robotic rover on the moon?
A hidden milestone lurks in the U.S.’s Artemis-focused lunar ambitions—the nation’s first-ever successful robotic moon rover
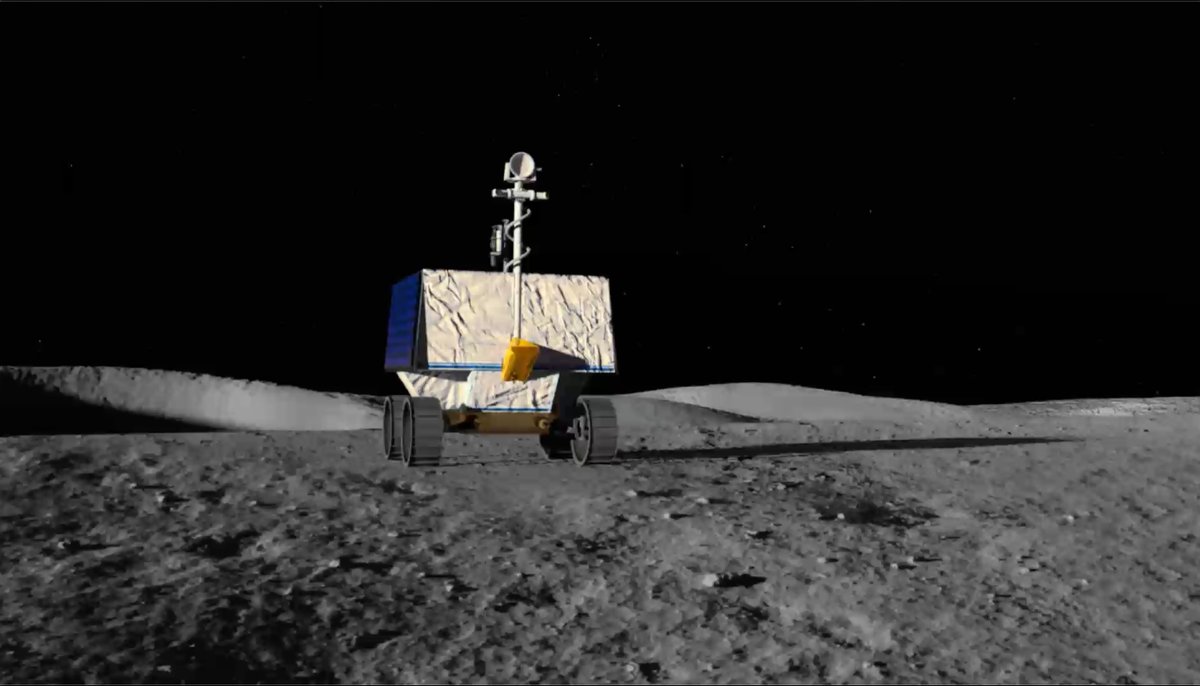
A short animation of NASA’s Volatiles Investigating Polar Exploration Rover, or VIPER, roaming the lunar surface. VIPER is one of several U.S. robotic rovers that could soon voyage to the moon.
NASA has launched four astronauts on a pioneering journey around the moon—the Artemis II mission. Follow our coverage here.
As NASA’s Artemis II mission unfolds, with four astronauts on the first crewed lunar voyage since 1972’s Apollo 17, the U.S.’s elite status as the only nation to ever send humans to the moon remains a point of patriotic pride. Yet in at least one aspect of lunar exploration, the U.S. is a surprising underachiever: it has never successfully deployed and operated a robotic rover on the moon.
That could change this year.
The Soviet Union took pole position in the lunar rover race in 1970 with its Lunokhod 1 mission, the first of two successful Soviet rovers. More recently, China’s ambitious space program has sent two rovers, one of which, Yutu-2, became the first human-made rover to operate on the lunar far side—where it is still working today. India and Japan are members of the lunar rover club, too.
On supporting science journalism
If you’re enjoying this article, consider supporting our award-winning journalism by subscribing. By purchasing a subscription you are helping to ensure the future of impactful stories about the discoveries and ideas shaping our world today.
Under the auspices of NASA’s Commercial Lunar Payload Services (CLPS) program, last year one company came close to finally putting the U.S. on the board. Lunar Outpost’s MAPP (Mobile Autonomous Prospecting Platform) rover reached the lunar surface alive and well within a lander built and operated by aerospace firm Intuitive Machines. But, alas, the mothership had landed askew, trapping MAPP inside. (Other mobile robotic payloads onboard—including the Massachusetts Institute of Technology–built AstroAnt, as well as Intuitive Machines’ surface-hopping Micro Nova craft—suffered the same fate.)

China’s Yutu-2 rover, as seen by the Chang’e-4 lander, on the far side of the moon.
Now Intuitive Machines is on track to try again by sending another CLPS lander to the moon in the second half of 2026. This time its payloads include Lunar Vertex, a small rover meant to investigate the mysteries of a “lunar swirl” called Reiner Gamma in a region known as Oceanus Procellarum on the moon’s near side. Three solar-powered mini rovers built by NASA’s Jet Propulsion Laboratory are also onboard that lander. Collectively called CADRE (Cooperative Autonomous Distribution Robotic Exploration), the tiny trio aims to show how multiple networked rovers can work together on the moon. And depending on which of these projects off-loads first, CADRE might steal the “first successful U.S. moon rover” title from Lunar Vertex.
Separately, another CLPS mission for the latter half of this year will see a Griffin lander from Astrobotic that will bring not one but two rovers to the lunar surface—Astrobotic’s own diminutive CubeRover and the hulking, nearly 500-kilogram Flex Lunar Innovation Platform (FLIP) rover from aerospace company Astrolab. This mission will target the south polar region, where companies and countries alike are pursuing the scientific and economic prospects of lunar water ice.
Thus, it’s a four-way race among Lunar Vertex, CADRE, CubeRover and FLIP to be the first-ever American lunar rover to successfully deploy and operate on the moon—assuming, that is, any of them manage to reach the surface. The CLPS program has so far sent four landers to the moon, but only one of those—the rover-free Firefly Blue Ghost Mission 1—has been considered a complete success.
“Wow, it hadn’t occurred to me that Lunar Vertex could be the first U.S. robotic rover to operate on the moon. Seems like a lot of responsibility!” says principal investigator David Blewett of the Johns Hopkins University Applied Physics Laboratory.
“Our rover is based on Lunar Outpost’s MAPP product,” Blewett says, noting that, despite MAPP’s ignominious demise inside the Intuitive Machines lander, it had survived long enough to gather and beam back data. “This provided valuable risk reduction and lessons learned for Lunar Vertex,” he says.
While the Artemis campaign garners most of the attention, rovers will matter immensely for U.S. lunar plans, Blewett believes.
“There will always be a place for robotic rovers. Even the ‘moon buggy’ that the Artemis astronauts will drive will be teleoperated when astronauts are not using it—which is most of the time,” he says.
NASA clearly concurs. “Conducting scientific exploration synergistically with crew and robotic explorers teaches us effective techniques that can be applied as we push the boundaries of space exploration,” a CLPS spokesperson tells Scientific American.
The idea of rover-aided human exploration isn’t new, according to space historian Dwayne Day. “NASA started a lot of programs in the early 1960s and began looking at rovers for astronauts and robotic rovers,” he says. “They considered a small rover that could be used as a landing site scout, looking over a site before a lunar module was sent there. But Apollo was moving fast, and NASA began cutting anything they deemed unnecessary, including robotic programs.”
Today, with the space agency intending to lean heavily on CLPS missions to help future Artemis astronauts, NASA’s abandoned Apollo-era rover plans seem downright quaint. But only time will tell if CLPS can succeed.
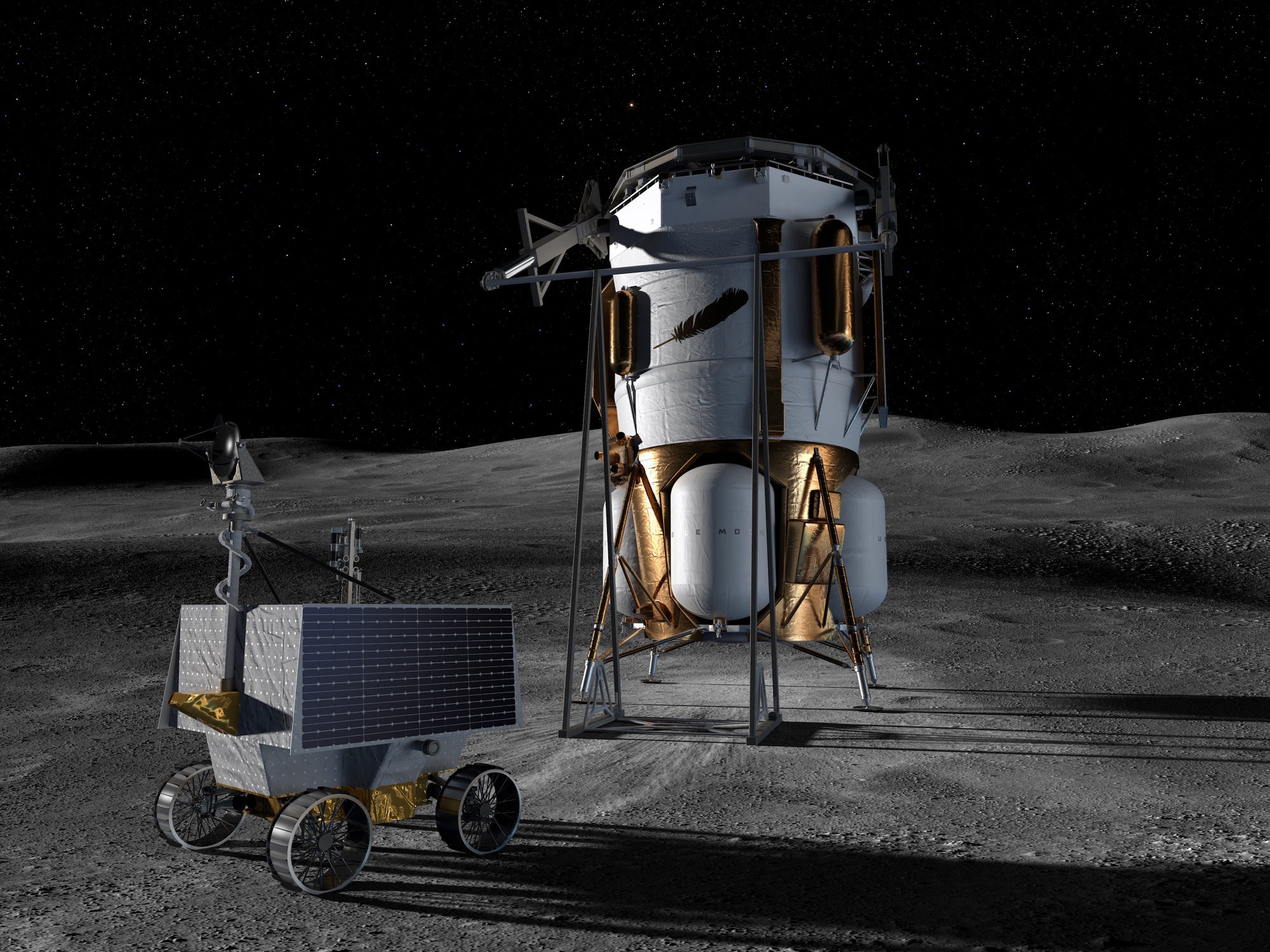
This artist’s concept shows Blue Origin’s Blue Moon Mark 1 lander and NASA’s VIPER rover on the lunar surface.
Even if all the aforementioned modern attempts fail to safely deliver their rover payloads to the moon, another dark horse contender still waits in the wings via a potential CLPS mission of its own. NASA’s on-again, off-again massive VIPER (Volatiles Investigating Polar Exploration Rover) could launch as early as next year. Developed at the space agency’s Ames Research Center, VIPER has followed a tortuous path to the moon, including a near-death experience in 2024 when NASA canceled the already-built rover as a cost-saving measure—only to then resurrect it after public outcry and congressional criticism. Now VIPER may ride to the lunar south pole on the planned second flight of Blue Origin’s underconstruction Blue Moon Mark 1 (MK1) lander, where it will scout for water ice—provided, it seems, that the MK1’s first flight is successful.
As great as the pressure already is on CLPS to deliver results, NASA’s expectations are only set to grow as it leans more heavily on private industry to help build a permanent lunar outpost as the Artemis program’s crown jewel. At the space agency’s “Ignition” event in March, its Moon Base program executive Carlos Garcia-Galan stated that NASA seeks to launch at least four CLPS missions in 2026 and a total of 25 by 2028, with a minimum of 21 successful landings. Many of these later CLPS missions will involve beefed-up landers toting heavier payloads to the moon to aid in the moon base’s incremental construction.
Casey Dreier, chief of space policy at the Planetary Society, notes that such an uptick would be unprecedented in spaceflight history. “Mobility on the moon is a good thing to figure out,” he says, although he worries that a heavy outpost-focused CLPS push could leave scientific objectives sitting on the lunar sidelines.
Given the difficulty of landing humans on the moon, let alone creating a permanent base there, it may be that our cousins, the robotic rovers, will stand in for humanity—at least for the time being.



